The Geometric Meaning of Matrix
The matrix means transform in computer graphics. We could use matrix to change the position of object in a reference frame.
In graphics we mostly consider about linear transform and affine transform. Rotation, scaling and orthogonal projection are linear transform. By adding translation, they'll be affine transforms.
What we need to take care is that the transform is not an absolute value but a relative one(in the world perspective) based on the reference frame. That is to say if we need to compute a transform of object using matrix, first thing to be considered is in which reference frame the object is. The transform, the current position and the position after transform are all in one reference frame.
The Literal Meaning of Matrix
What does the entry values mean in matrix?
Think about the following equations:
\begin{equation} \left[\begin{array}{cc}1 & 0 & 0 \end{array}\right] \begin{bmatrix} m_{11} & m_{12} & m_{13} \cr m_{21} & m_{22} & m_{23} \cr m_{31} & m_{32} & m_{33} \end{bmatrix} = \left[\begin{array}{cc}m_{11} & m_{12} & m_{13} \end{array}\right] \end{equation}
\begin{equation} \left[\begin{array}{cc}0 & 1 & 0 \end{array}\right] \begin{bmatrix} m_{11} & m_{12} & m_{13} \cr m_{21} & m_{22} & m_{23} \cr m_{31} & m_{32} & m_{33} \end{bmatrix} = \left[\begin{array}{cc}m_{21} & m_{22} & m_{23} \end{array}\right] \end{equation}
\begin{equation} \left[\begin{array}{cc}0 & 0 & 1 \end{array}\right] \begin{bmatrix} m_{11} & m_{12} & m_{13} \cr m_{21} & m_{22} & m_{23} \cr m_{31} & m_{32} & m_{33} \end{bmatrix} = \left[\begin{array}{cc}m_{31} & m_{32} & m_{33} \end{array}\right] \end{equation}
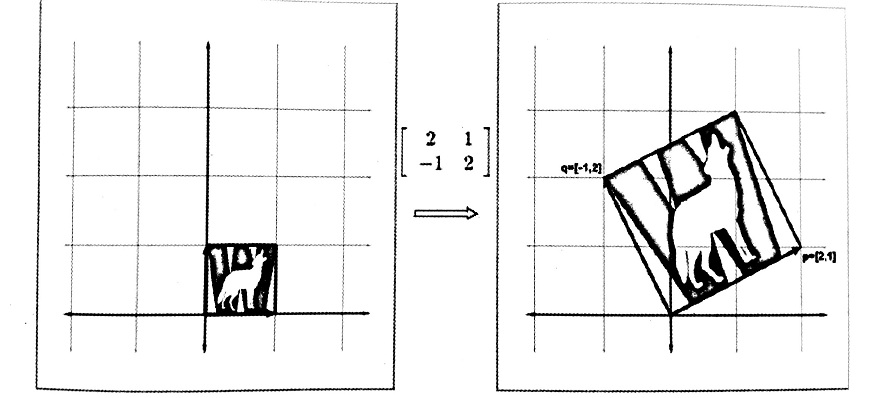
If the matrix is a transform, we could see that the three base vectors are exactly the same as three rows of matrix after the transform. In other words, the matrix could be considered as three vectors which are transformed from three base vectors in the original reference frame.
Transform Between Different Reference Frames
We only talked about transforms in the same reference frame before. Now we need to think about transforms in different Frames which is an important problem in computer graphics.
Given a 2d reference frame named $F_g$, the base vectors are $\alpha_1 = \begin{array}{}[1 & 0]\end{array}$, $\alpha_2 = \begin{array}{}[0 & 1]\end{array}$ and the original point is $O_g = \begin{array}{}[0 & 0]\end{array}$, the new reference frame named $F_n$, the new base vectors are $\beta_1 = \begin{array}{}[m_1 & m_2]\end{array}$, $\beta_2 = \begin{array}{}[n_1 & n_2]\end{array}$ and the original point is $O_n = \begin{array}{}[o_1 & o_2]\end{array}$ which are all measured in the given frame $F_g$. Now given a point $P_g$ in $F_g$, what's the value $P_n$ in $F_n$?
This problem is the basic setting of this part.
From vector rules, we could get $\overrightarrow{\rm O_nP_n} = \overrightarrow{\rm O_nO_g} + \overrightarrow{\rm O_gP_g}$, that is \begin{equation} (x_n * \beta_1 + y_n * \beta_2) = (O_g - O_n) + (x_g * \alpha_1 + y_g * \alpha_2) \end{equation}
Matrix form: \begin{equation} \left[\begin{array}{cc}x_n & y_n\end{array}\right] \begin{bmatrix} m_1 & m_2 \cr n_1 & n_2 \end{bmatrix} = \left[\begin{array}{cc}-o_1 & -o_2\end{array}\right] + \left[\begin{array}{cc}x_g & y_g\end{array}\right] \begin{bmatrix} 1 & 0 \cr 0 & 1 \end{bmatrix} \end{equation}
Homogeneous coordinates: \begin{equation} \left[\begin{array}{cc}x_n & y_n & 1\end{array}\right] \begin{bmatrix} m_1 & m_2 & 0 \cr n_1 & n_2 & 0 \cr 0 & 0 & 1 \end{bmatrix} = \left[\begin{array}{cc}x_g & y_g & 1\end{array}\right] \begin{bmatrix} 1 & 0 & 0 \cr 0 & 1 & 0 \cr -o_1 & -o_2 & 1 \end{bmatrix} \end{equation}
So we could solve it and get the transform matrix $T$, let $P_n = P_g T$
References
- 3d primer for graphics and game development(3d数学基础:图形与游戏开发)