In computer vision, especially in multiple view geometry, epipolar constraint and essential matrix are the basic concepts, which reveal the geometry relationship of different cameras. We could estimate camera position and recover the depth of scene by this relationship.
Essential Matrix
Given two cameras with different poses, what is the relationship between them?
From the camera model, we know the projection between 3d coordinates and image plane is that $x=f\frac{X}{Z}$ and $y=f\frac{Y}{Z}$. Assume $X_1$ and $X_2$ are the same space points in the two camera views, what we want to know is the transform between that, which is:
\begin{equation} X_2 = RX_1+T \end{equation}
By using the 2d points in images, we have:
\begin{equation} \lambda_2x_2=\lambda_1Rx_1+T \end{equation}
where $\lambda_1, \lambda_2$ are the ratios between focal length and depth.
Multiply by $T_c= \begin{bmatrix} 0 & -t_z & t_y \cr t_z & 0 & -t_x \cr -t_y & t_x & 0 \end{bmatrix}$($TT_c=0$), we get:
\begin{equation} \lambda_2T_cx_2=\lambda_1T_cRx_1 \end{equation}
Then multiply by $x_2^T$, the left side will become zero. So we could get the final relationship:
\begin{equation} x_2^TEx_1=0 \end{equation}
where $E=T_cR$, which is called the essential matrix. If we put the intrinsic parameters of cameras into the equation, the fundamental matrix will be got.
Epipolar Constraint
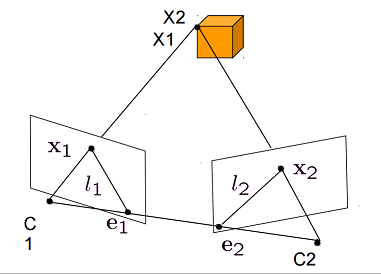
Another important rule is about epipolar constraint. As we could see that the space point and two camera centers form a triangle which represents the epipolar plane. The points projected on the two images must lie in the intersection lines, which are called epipolar lines, from the geometry.
Now if we consider the $x_2^TE$ as line parameters like $[a \ b \ c]$, and $x_1$ as unknown points like $[x \ y \ 1]$, the line could be represented as $ax+by+c=0$, which is the epipolar line $l_1$. It is decided by $x_2$ and passes through $x_1$. Vice versa. The relation is denoted as:
\begin{equation} l_1 : x_2^TE \end{equation}
However, the line $l_1$ passes through $x_1$, but many lines do the same thing, why does it must be epipolar line?
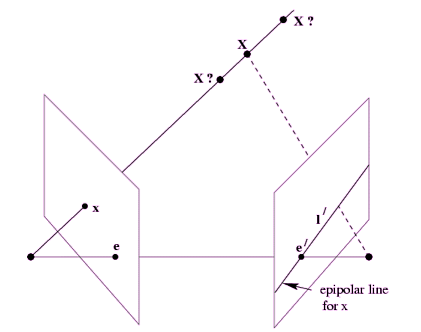
We can see that, in the projection line, every points on the image are at the same position $x_2$, and decide the same line. As the space points are coplanar based on triangulation, the decided line must be epipolar line $l_1$.
Since epipolar point $e_1$ lies in the line $l_1$, it has $x_2Ee_1=0$. As we could see that, it belongs to all epipolar lines. That is to say that no matter what $x_2$ is, the equation is forever established. So there exists:
\begin{equation} Ee_1=0 \end{equation}
The epipolar constraint could be used by fast point correspondence matching and other useful computation process.
References
-
http://frc.ri.cmu.edu/~kaess/vslam_cvpr14/media/VSLAM-Tutorial-CVPR14-A11-VisualOdometry.pdf
-
Multiple View Geometry